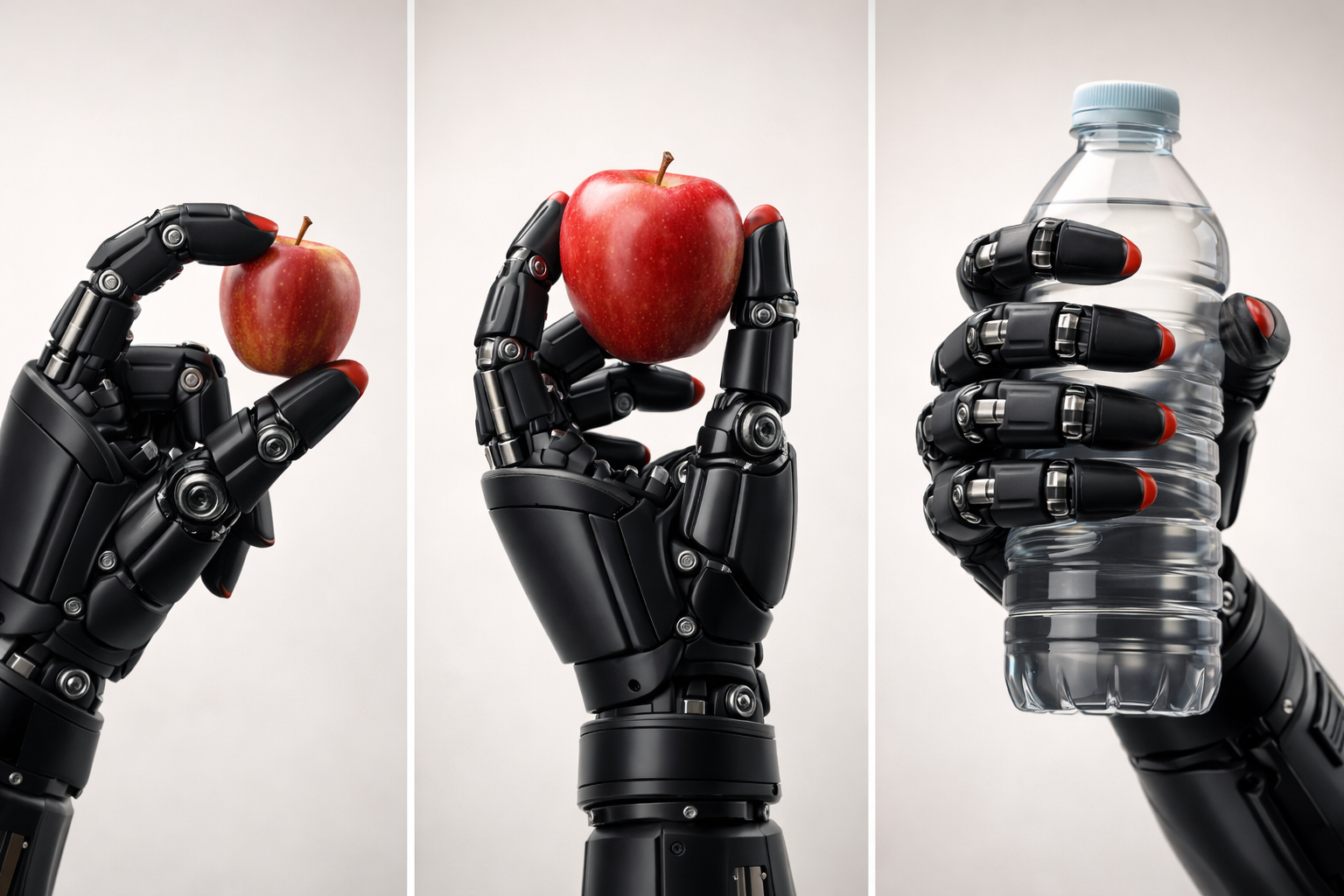
Five-finger configuration enabling human-like manipulation strategies including pinch, tripod, and power grasps.
Cable-driven architecture provides natural compliance, allowing safe interaction with fragile and irregular objects.
Designed to support:- Tactile sensing skins- Force sensing- Joint angle sensing- Vision-guided grasping
Compatible with:- VR-based teleoperation- Glove-based control- Imitation learning data collection
Designed to support:- Reinforcement learning- Imitation learning- Vision-Language-Action models- Sim-to-real transfer
From homes to retail to logistics, we’re building robots that integrate naturally into the spaces people rely on every day.
.webp)

.webp)





.webp)